



高仙是全球较早从事自主移动技术研发与应用探索的机器人公司之一。成立至今,高仙不断打磨并完善了机器人全场景移动技术,并通过全球超过50+机型、1万+机器人终端在5000+行业的落地积累,实现了从室内到室外等不同环境、从清洁到安防等不同业务领域的广泛应用。高仙机器人全场景移动技术给越来越多的机器人赋予了自主移动必需的“躯壳”、“大脑”和“灵魂”。
本篇文章将概括性的介绍高仙机器人全场景移动技术,未来小编将通过《高仙技术家》专栏持续为大家更新技术类文章,和大家一起分享高仙在追求全场景移动机器人应用中所遇到的挑战、思考和技术方案。
所谓“场景”,指的是一个事物存在的、并与之产生相互作用的周遭环境。机器人的应用场景决定了机器人的形态和所需要的技术。我们可以从环境场景和业务场景两个角度进行分析。
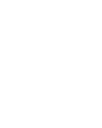
这里环境场景又可以分为两个维度,即机器人的运行速度和环境的结构化程度。图1是一个以机器人运行速度和环境结构化程度为横纵坐标的机器人应用象限图——左下角是以室内家用扫地机为代表的低速、结构化场景,右上角是以开放道路无人驾驶为代表的高速、非结构化场景,应用难度从左下角到右上角依次增大。
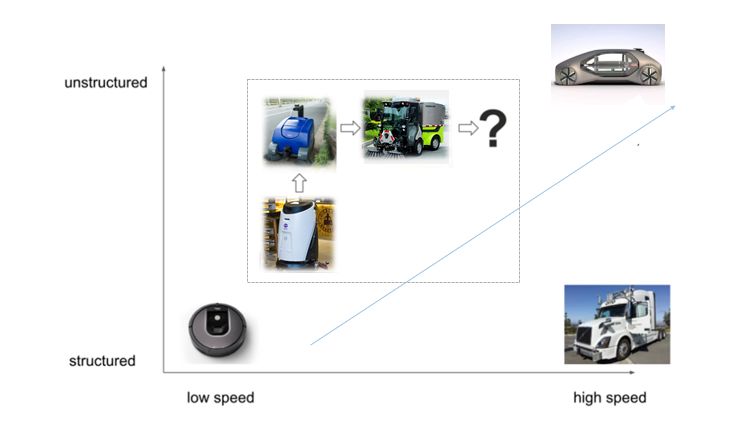 图 1. 移动机器人应用场景图
图 1. 移动机器人应用场景图对于移动机器人来讲,目前的业务场景主要包括服务机器人、物流配送、清洁环卫、安防和乘用车无人驾驶。不同的业务场景对于机器人的运行状态有不同的要求。例如,服务机器人对于人机交互的人性化程度比较高,而其他应用场景则不敏感;无人驾驶乘用车对于运行的舒适度、速度均有很高要求,而物流配送车则主要关心时效性。
目前高仙的机器人全场景移动技术通过50+机型、1万+终端覆盖了5000+行业,实现了以清洁、安防、楼宇配送三大垂直领域为主的室内+室外跨场景应用布局。广阔的业务场景给高仙带来了广阔的发展空间,也带来了对通用的、全场景的移动机器人技术的迫切需求。通过对市场和技术成熟度的综合考虑,高仙决定以低速场景为切入点,打通室内结构化环境和室外非结构化环境的自主导航能力,逐步推进全场景移动机器人的研发。
高仙全场景移动机器人系统包括机器人端和后台两大部分。其中,机器人端包括了机器人上层的核心算法、中层的操作平台以及下层的硬件系统,后台包括了各项部署在云端、用来支撑核心算法的数据管理、系统调度和仿真等基础能力。机器人端和后台两个部分相辅相成,互相配合,共同实现了高仙机器人的导航功能和作业任务。
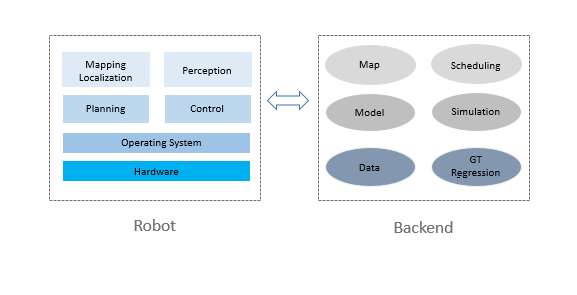 图2. 高仙全场景移动机器人系统
图2. 高仙全场景移动机器人系统如果说硬件是机器人的躯壳,操作系统是机器人的大脑,那么核心算法就是机器人的灵魂。从功能上看,机器人核心算法包含四大模块:建图和定位、环境感知、路径规划和运动控制。其中,建图和定位模块回答了机器人“我在哪儿的问题”,环境感知模块告诉机器人它的境遇,路径规划模块回答了机器人“我要到哪儿去”和“如何去”的问题,最后运动控制模块告诉它如何走好每一小步。

图3. 无人驾驶技术难度示意
高仙采用SLAM(Simulaneous Localization and Mapping) 技术解决建图和定位问题。通过对激光SLAM、视觉vSLAM和语义SLAM等多种技术的有效融合,我们提出了SLAM2.0技术,可实现贯通室内和室外全场景的大规模建图能力、机器人厘米级的精确定位能力、对环境的深度理解力和对地图进行动态更新的能力。在环境感知方面,高仙开发了一套完整的的多模态多传感器融合方案。我们综合利用了激光、视觉摄像头、深度摄像头、超声等多种传感器模态,结合了机器人学、经典机器学习和深度学习等多种方法,以实现对周围环境中静态结构(如室内的桌椅板凳、室外的车道线等)的识别和对动态物体(如行人、车辆等)的检测、追踪和行为预测。在路径规划和运动控制方面,高仙的自研算法实现了复杂场景中实时高效的路径规划和准确优化的运动控制。
在前文中已经提到,广阔的业务场景给高仙带来了很大的发展空间,也带来了很多的技术挑战。其中最大的挑战便是,如何用一套导航算法赋能不同环境的、不同业务领域的不同机器人。高仙的解决方法便是抽象建模和功能解耦。
请大家想象两个机器人,第一个机器人是室外沿着路边清扫落叶的大型环卫机器人,第二个机器人是室内沿着走廊行走的配送机器人,请大家思考一下他们的异同——虽然这两个机器人的作业任务、作业环境和作业平台都不相同,他们的工作本质却是相同的,即识别一个物理边界并沿着它行走。高仙在进行算法设计的时候,会对不同任务、不同环境、不同硬件的机器人应用进行建模,抽象并开发通用的基础技术,力求用同一套算法实现看似迥异的场景应用。
图4. 高仙机器人功能解耦
面对全场景应用的挑战,我们第二个解决思路是解耦,即解耦机器人的导航功能和业务功能,用一套通用的导航算法赋能不同的业务领域。我们打一个比喻就是,洗地机就是“驾驶员”加“清洁工”,安防巡逻机器人就是“驾驶员”加“哨兵”,等等(如图3所示)。解耦的核心就是将业务逻辑和导航逻辑完全分离,并通过必要的通信完成二者的相互配合。
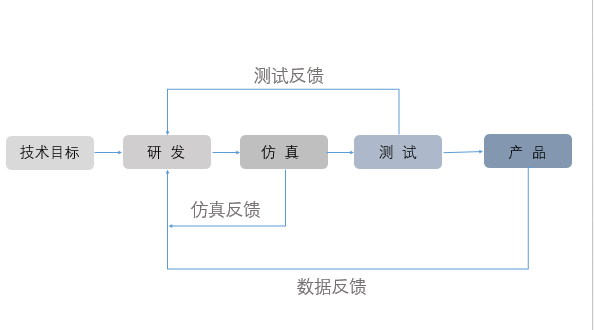
图5. 高仙闭环迭代式开发
机器人技术是一项实验性极强的技术,它的开发和完善一般需要很长的周期。为了实现产品的快速落地和从实践中学习,高仙机器人技术的开发遵循着“迭代式”和“闭环”两个原则。其中,迭代式指的是“不求完美,只求精进”,通过周期性的研发迭代不断地打磨技术和产品;“闭环”指的是通过各个环节的性能反馈为技术的改进指明方向。高仙的闭环开发包括三个重要的反馈环节,即基于仿真的反馈、基于测试的反馈以及基于用户真实数据的反馈。
文/高仙机器人